1. Far-near combined positioning of picking-point based on depth data features for horizontal-trellis cultivated grape.
Computers and Electronics in Agriculture(2022影响因子6.757)
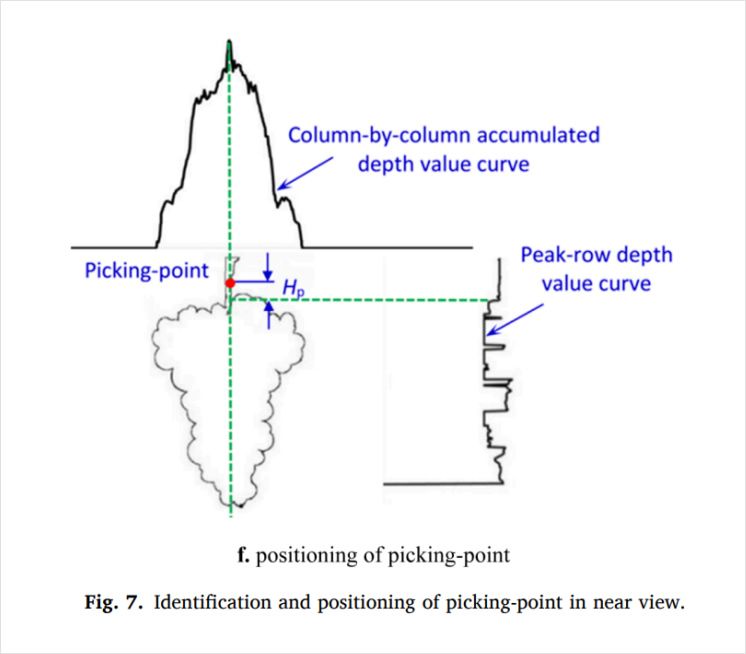
基于深度数据特征的水平棚架栽培葡萄远近联合定位对于通常通过抓茎和切茎来实现的串状葡萄机器人采收,切茎上的精确定位至关重要。提出了一种结合远景和近景深度数据特征的水平棚架栽培葡萄采摘点精准定位方法。首先,提出了一种利用深度点云数据获取的葡萄簇特征和水平棚架环境特征的远近组合采摘点定位策略;然后提出了满足远近组合需求的特殊“眼-指下”结构,并定义了决定远近组合手眼路径的3个关键点:远视点、近视点和采摘点。最后,以葡萄簇底部为关键线索,建立了由远视图葡萄簇检测、近视图切换和基于近视图深度数据直方图的采摘点定位组成的远近组合方法。该方法有望克服传统图像处理方法中黑箱处理的不足。