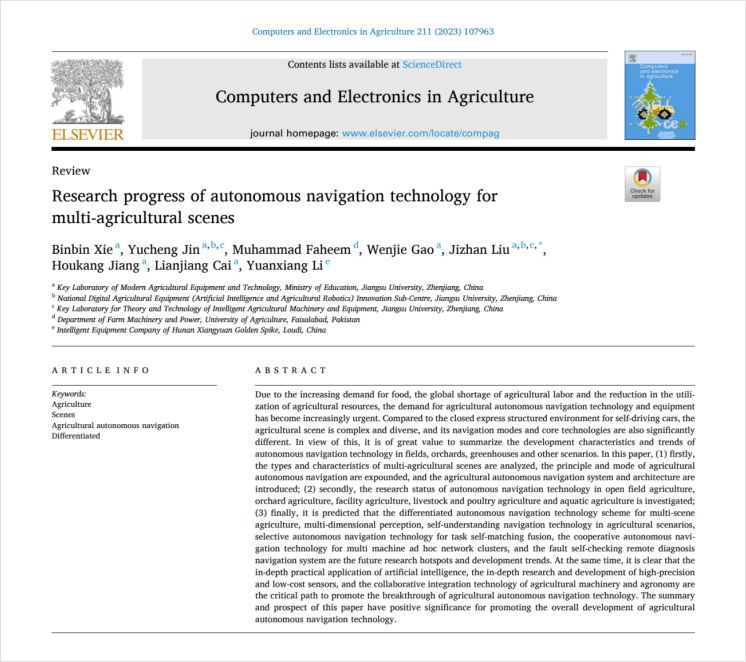
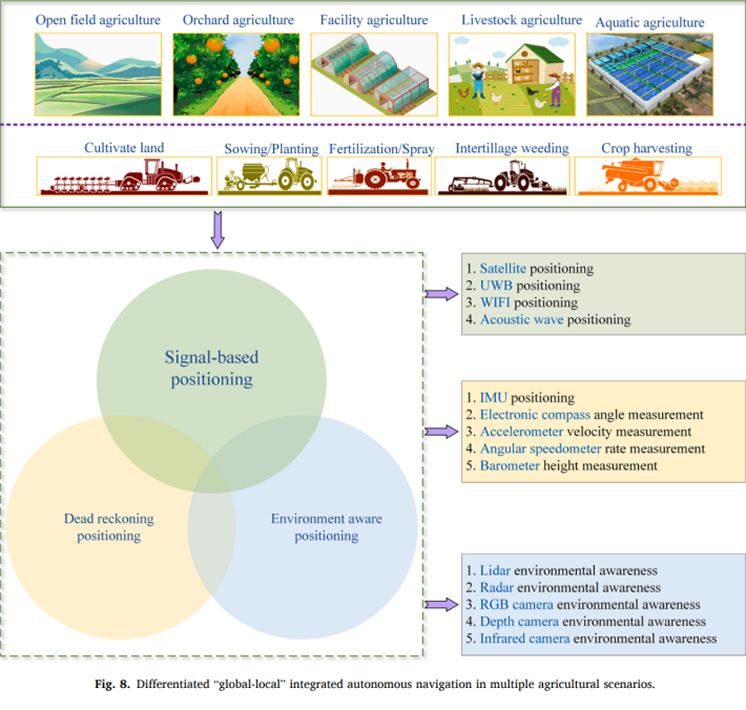
1. Research progress of autonomous navigation technology for multi-agricultural scenes.
Computers and Electronics in Agriculture(2023影响因子6.757)
由于粮食需求的日益增长、全球农业劳动力的短缺以及农业资源利用率的降低,对农业自主导航技术和设备的需求日益迫切。与自动驾驶汽车封闭式的快速结构化环境相比,农业场景复杂多样,其导航模式和核心技术也有显著差异。鉴于此,总结自主导航技术在田间、果园、温室等场景下的发展特点和趋势具有重要价值。本文首先分析了多农业场景的类型和特点,阐述了农业自主导航的原理和模式,介绍了农业自主导航系统和体系结构;(2)其次,自主导航技术在露地农业,果园农业,设施农业,调查了畜禽养殖业和水产养殖业;(3)最后预测了多场景农业的差异化自主导航技术方案,多维感知,农业场景下的自理解导航技术,任务自匹配融合的选择性自主导航技术、多机自组网集群的协同自主导航技术、故障自检远程诊断导航系统是未来的研究热点和发展趋势。同时,明确人工智能的深入实际应用、高精度低成本传感器的深入研发、农机农艺协同融合技术是推动农业自主导航技术突破的关键路径。本文的总结和前景对推动农业自主导航技术的全面发展具有积极意义。

2. Multi-feature detection of in-field grain lodging for adaptive low-loss control of combine harvesters.
Computers and Electronics in Agriculture(2023影响因子6.757)
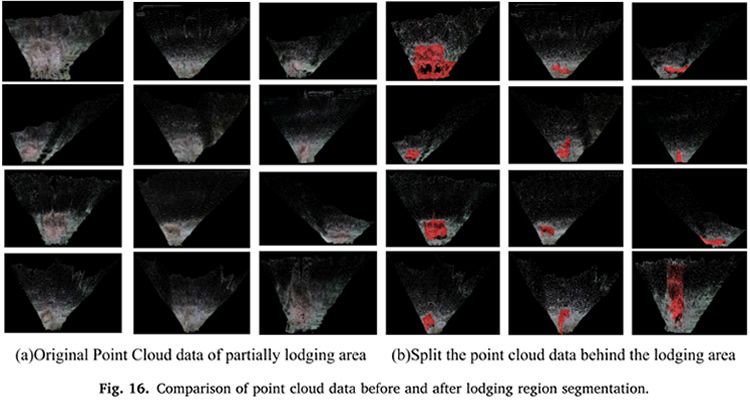
粮食倒伏现象显著影响自动驾驶收割机的低损失收获性能,在田间同时检测多特征粮食倒伏信息已成为客观趋势。为解决粮食倒伏地区收成损失高的问题,提出了一种基于深度相机三维点云数据同步检测粮食倒伏多特征信息的新方法,以实现无人低损失收获的自适应调控。倒伏谷物的多特征信息由倒伏位置、倒伏程度和倒伏方向组成,可为自动驾驶收获机的自适应调节提供有效的支持信息。对于对比度特征较低的粮食收获作业场景,充分利用位于非滞留区域的倒伏区域的环境特征,构建同步的粮食倒伏多特征信息机载提取策略。该方法为粮食倒伏多特征信息的机载同步检测提供了有效的解决方案,可显著降低粮食倒伏地区的收获损失,有望加快真正意义上的无人收获作业的发展。

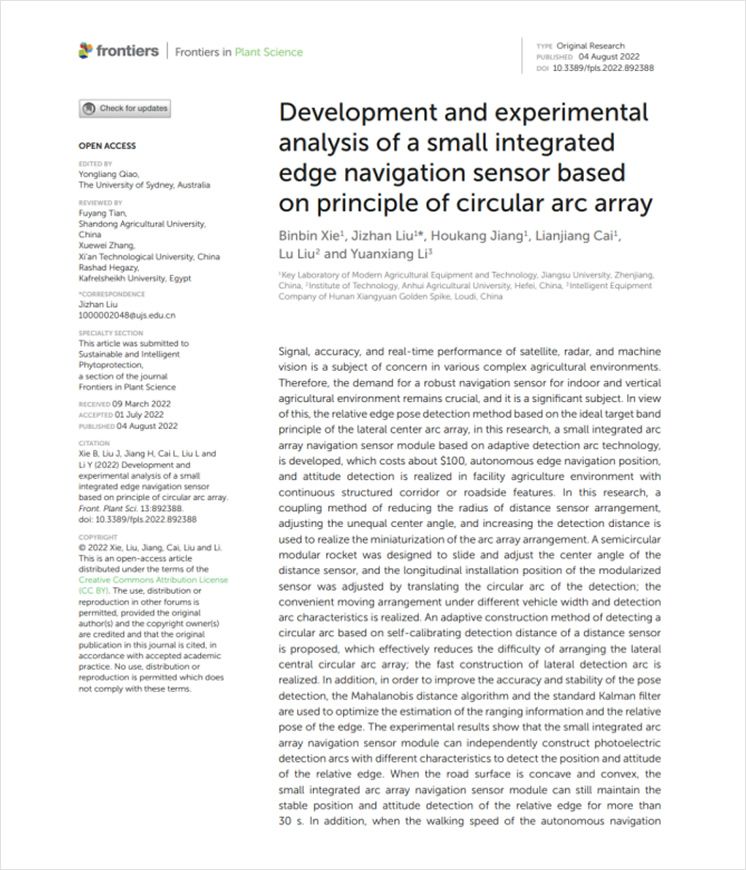
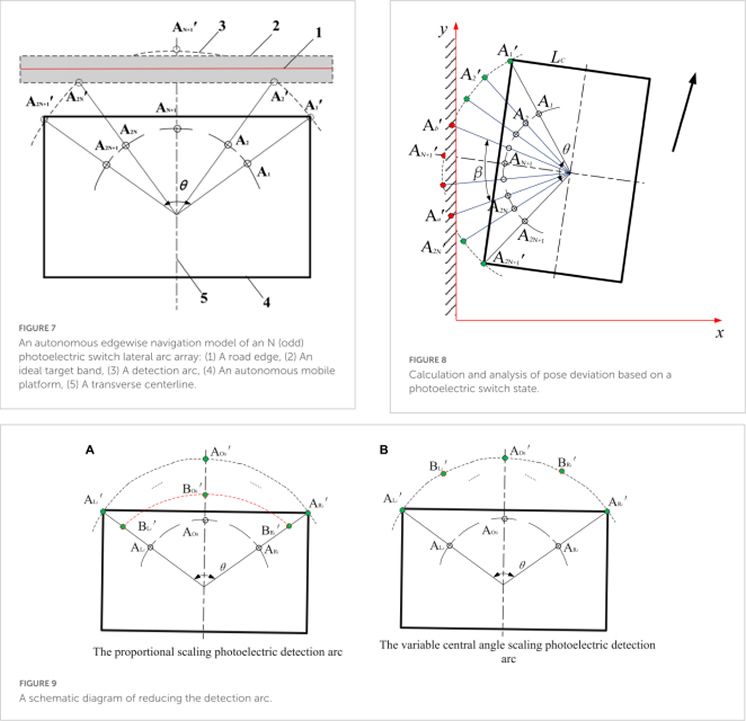
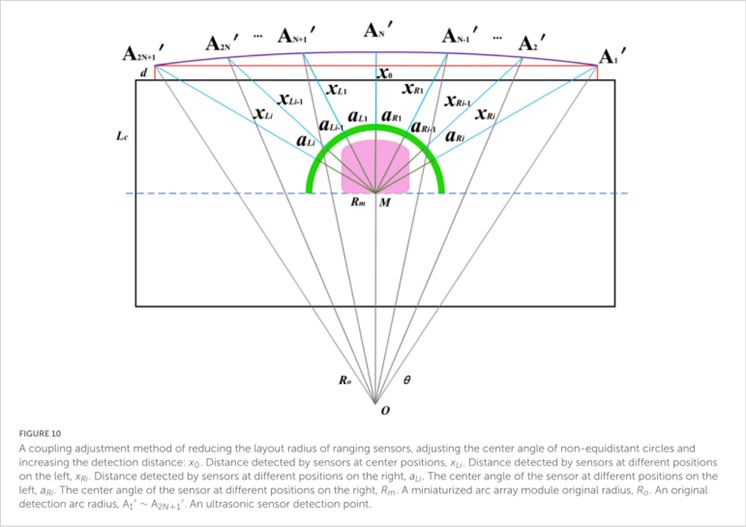
3. Development and experimental analysis of a small integrated edge navigation sensor based on principle of circular arc array.
Frontiers in Plant Science(2022影响因子6.627)
卫星、雷达和机器视觉的信号、精度和实时性能是各种复杂农业环境中备受关注的主题。鉴于此,本文提出了基于理想目标带原理的横向中心圆弧阵列相对边缘位姿检测方法,可有效地降低了横向中心圆弧阵列布置的难度,实现横向检测弧的快速构建。研制了一种基于自适应检测圆弧技术的小型集成圆弧阵列导航传感器模块,该模块具有使用快捷方便、精度高、成本低等优点,可应用于温室和动植物工厂的自主边缘导航控制。